Lab 07 - ORB-SLAM3 cz. 1
Lab. 07 - SLAM Wizyjny (ORB-SLAM3) cz. 1

1. ORB-SLAM3
ORB-SLAM3 jest trzecim z serii systemem z grupy prof. Tardosa opartym na wykrywaniu cech charakterystycznych ORB na obrazie, ich dopasowywaniu za pomocą opisu każdej cechy (deskryptory) oraz ostatecznej optymalizacji pozy z wykorzystaniem błędu reprojekcji.
Różnice pomiędzy systemami ORB-SLAM w skrócie:
- 2015, ORB-SLAM - wersja monokularowa
- 2017, ORB-SLAM2 - wersja monokularowa, stereowizyjna, RGB-D
- 2020, ORB-SLAM3 - wersja monokularowa, stereowizyjna, RGB-D. Każda z wersji bez lub z pomiarami z IMU. Łączenie wielu map w celu budowy mapy świata.
2. Cel zajęć
Celem zajęć jest uruchomienie lokalizacji 3D z wykorzystaniem systemu ORB-SLAM3 na danych z eksperymentów przeprowadzonych na terenie Politechniki Poznańskiej.
3. Przygotowanie środowiska
Przed przystąpieniem do pracy należy przygotować środowisko: Instrukcja przygotowania środowiska do zajęć.
Domyślnie kontener nosi nazwę ARM_07.
UWAGA! Skrypty po uruchomieniu usuwają kontener o takiej nazwie przed utworzeniem nowego.
Wersja Alternatywna: Obraz (większy rozmiar)
UWAGA: Wersja z obrazem może nie działać na części komputerów z uwagi na brak kompatybilności budowanych bibliotek. Sugerowana jest opcja samodzielnego zbudowania obrazu z wykorzystaniem Dockerfile’a!
Obraz konieczny do wykonywania dzisiejszych zajęć opiera się o
osrf/ros:humble-desktop-full, ale zawiera paczki, które są
niezbędne do prawidłowego wykonania zadań. Obraz można pobrać z tego linku.
Pobrany obraz należy wczytać, korzystając z polecenia, podając odpowiednią ścieżkę:
docker load < path/to/file.tar.gzNastępnie można przejść do tworzenia kontenera korzystając ze
skryptów przygotowanych dla osób korzystających
wyłącznie z CPU lub wyposażonych
w GPU Nvidia. Można pobrać odpowiedni skrypt korzystając np. z
wget.
Domyślnie kontener nosi nazwę ARM_07. UWAGA! Skrypty po uruchomieniu usuwają kontener o takiej nazwie przed utworzeniem nowego.
Korzystanie z kontenera
Po każdym ponownym uruchomieniu komputera, proszę pamiętać o wywoływaniu:
xhost +local:rootNowy terminal można dołączyć do kontenera korzystając z polecenia:
docker exec -it ARM_07 bashROS_DOMAIN_ID
W przypadku pracy na wielu komputerach w tej samej sieci lokalnej
(eduroam też może tego wymagać), konieczne może być ustawienie
zmiennej środowiskowej ROS_DOMAIN_ID na różnych
wartościach. Należy wybrać dowolną liczbę całkowitą z zakresu 0-100.
Wartość tę należy ustawić w pliku ~/.bashrc:
export ROS_DOMAIN_ID=10 # przykładowa wartośćlub bezpośrednio w terminalu (wtedy będzie obowiązywać tylko w tym terminalu):
export ROS_DOMAIN_ID=10 # przykładowa wartośćSugerowane jest użycie dwóch ostatnich cyfr numeru IP komputera jako
wartości ROS_DOMAIN_ID, aby uniknąć konfliktów z innymi
użytkownikami w sieci. Aby sprawdzić swój adres IP, można użyć
polecenia:
ip addr showadres IP będzie widoczny przy interfejsie sieciowym, np.
wlan0 lub eth0.
Wygodne może być dodanie tego exportu do bashrc:
echo 'export ROS_DOMAIN_ID=<wybrana_wartość>' >> ~/.bashrc 4. Uruchomienie ORB-SLAM3
Konfigruacja i budowanie (tylko w wersji z obrazem, w Dockerfile jest to już zrobione)
W pliku /arm_ws/src/ORB_SLAM3_ROS2/CMakeLists.txt
usuwamy linijkę
set(ENV{PYTHONPATH} "/opt/ros/foxy/lib/python3.8/site-packages/").
Dodajemy również find_package(OpenCV REQUIRED) koło innych
find_package oraz
target_link_libraries(mono ${OpenCV_LIBS})
target_link_libraries(rgbd ${OpenCV_LIBS})
target_link_libraries(stereo ${OpenCV_LIBS})
target_link_libraries(stereo-inertial ${OpenCV_LIBS})tuż przed ament_package()
Następnie w pliku
ORB_SLAM3_ROS2/MakeModules/FindORB_SLAM3.cmake linijkę
set(ORB_SLAM3_ROOT_DIR "~/Install/ORB_SLAM/ORB_SLAM3")
zmieniamy na set(ORB_SLAM3_ROOT_DIR "/ORB_SLAM3").
Możemy przejść teraz do budowania paczki:
cd /arm_ws
source /opt/ros/humble/setup.bash
colcon build --symlink-installUruchamianie
W tej instrukcji będziemy wykorzystywać paczkę ORB_SLAM3_ROS2. Jest to wrapper paczki ORB_SLAM3 do ROS2. Uruchomić system można następującym poleceniem:
cd /arm_ws
source install/setup.bash
ros2 run orbslam3 stereo-inertial /arm_ws/src/orbslam3_ros2/vocabulary/ORBvoc.txt /arm_ws/src/orbslam3_ros2/config/stereo-inertial/EuRoC.yaml truePrzekazywane argumenty to:
ros2 run orbslam3 stereo-inertial PATH_TO_VOCABULARY PATH_TO_YAML_CONFIG_FILE BOOL_RECTIFYPo załadowaniu słownika, powinno pojawić się okno, w którym będzie wizualizowany przebieg lokalizacji i budowy mapy.
EuRoC
Kolejnym krokiem (w osobnym terminalu) będzie odtworzenie baga
zawierającego dane zarejestrowane na potrzeby
EuRoC Dataset:
ros2 bag play -r 0.5 bags/MH_02_easy -p --remap /cam0/image_raw:=/camera/left /cam1/image_raw:=/camera/right /imu0:=/imuBag zostanie odtworzony zapauzowany i z rate wynoszącym
0.5 normalnego tempa.
Uruchomienie odtwarzania nastąpi po wciśnięciu klawisza
spacja z aktywnym terminalem, w którym odtwarzany jest
bag.
Po zakończeniu baga można kliknąć przycisk Stop z lewej
strony okna ORB-SLAM3: Map Viewer. Spowoduje to zapisanie
trajektorii do pliku. 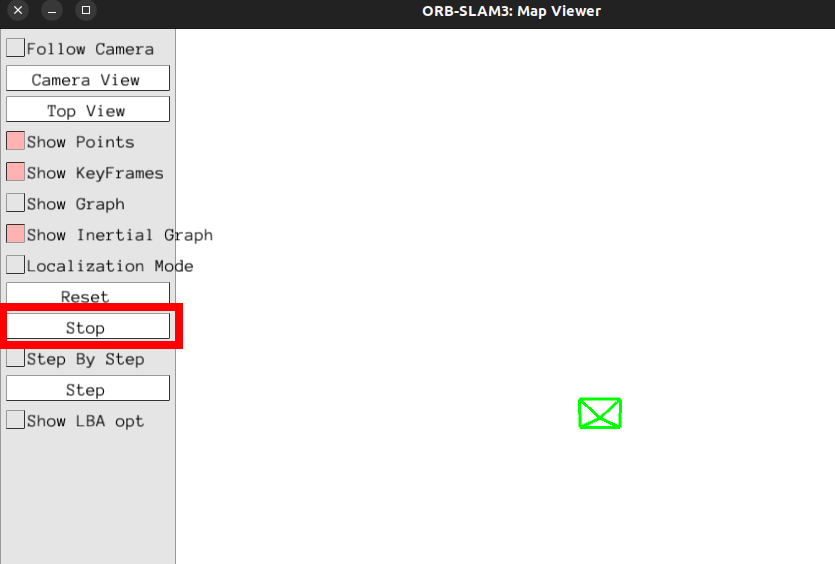 Następnie
można zamknąć program w terminalu korzystając z
Następnie
można zamknąć program w terminalu korzystając z Ctrl+C.
PUT Car
Na potrzeby zajęć zostały przygotowane również dane zebrane z samochodu, który zrobił okrążenie kampusu Piotrowo na Politechnice Poznańskiej. Sam samochód był wyposażony dodatkowo w DGPS, który dostarczył informacji o referencyjnym położenia co umożliwia ocenę dokładności lokalizacji ORB-SLAM3.
Baga można uruchomić poleceniem:
ros2 bag play -r 0.25 bags/put_car -p --remap /pylon_stereo_node/left/image_raw:=/camera/left /pylon_stereo_node/right/image_raw:=/camera/righta ORB-SLAM3:
ros2 run orbslam3 stereo /arm_ws/src/orbslam3_ros2/vocabulary/ORBvoc.txt /arm_ws/src/orbslam3_ros2/config/stereo/PP.yaml trueSam proces nie będzie działał jednak poprawnie (nie jest to potrzebne
na dzisiejsze zajęcia). Konieczne jest wprowadzenie poprawek do pliku
PP.yaml, więcej informacji można znaleźć w instrukcji
do kolejnych zajęć.
Dane z DGPS
Lokalizacja z DGPS znajduje się w topicu /dgps_ublox/fix
w polach latitude, longitude,
altitude w wiadomości o typie sensor_msgs/NavSatFix.
W tej wiadomości znajduje się podwiadomość sensor_msgs/NavSatStatus
zawierająca pole status określające aktualny status GPS. Wartości pola
status 2 oznacza działanie w trybie FLOAT i
FIXED o dokładności kilkunastu i kilku centymetrów, a więc
wystarczające na potrzeby ewaluacji. Wiadomości o innym statusie
pomijamy.
Zadaniem na dziś jest pobranie tych wiadomości i wygenerowanie danych w układzie kartezjańskim (metrycznym) w pliku w formacie:
timestamp x y z 0 0 0 1gdzie każda linia oznacza jeden pomiar z DGPS. Timestamp powinien być podany w sekundach (nanosekundy powinny być odpowiednio przemnożone i dodane do sekund) oraz nie powinien być podawany względem pierwszej klatki (tylko taki jaki jest w headerze).
Przykładowe dane
0.10917210578918457 0.0 0.0 0.0 0 0 0 1
0.20450401306152344 0.0 0.0 0.0 0 0 0 1
0.30379199981689453 0.0 0.0 0.0 0 0 0 1
0.40042805671691895 0.0 0.0 0.0 0 0 0 1
0.5102488994598389 0.0 0.0 0.0 0 0 0 1
0.6169729232788086 0.0 0.0 0.0 0 0 0 1
0.7178809642791748 0.0 0.0 0.0 0 0 0 1
0.8190329074859619 0.01133701391518116 0.0003059105947613716 0.0 0 0 0 1
0.919395923614502 0.01133701391518116 0.0003059105947613716 0.0 0 0 0 1
1.019887924194336 0.0 0.0 0.0 0 0 0 1
1.1192939281463623 0.01133701391518116 0.0003059105947613716 0.0 0 0 0 1
1.217073917388916 0.0 0.0 0.0 0 0 0 1
1.3097131252288818 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
1.4139900207519531 0.0 0.0 0.0 0 0 0 1
1.5189399719238281 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
1.6158969402313232 -0.01033670362085104 -0.037377264350652695 0.0 0 0 0 1
1.7149569988250732 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
1.8018219470977783 -0.010836857953108847 -0.01884158607572317 0.0 0 0 0 1
1.918416976928711 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
2.0159919261932373 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
2.1164350509643555 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
2.2082679271698 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
2.3125860691070557 0.011837168363854289 -0.018229764886200428 0.0 0 0 0 1
2.413172960281372 0.0005001543322578073 -0.0185356754809618 0.0 0 0 0 1
5. Zadanie do samodzielnej realizacji
Efekt dzisiejszego zadania będzie niezbędny na następne zajęcia, dlatego wyjątkowo jest na jego wykonanie 1 tydzień.
Konieczne będzie przeprowadzenie konwersji danych DGPS do układu kartezjańskiego. W tym celu należy:
- Napisać node ROS do subskrypcji danych z DGPS (łatwiejsza opcja) lub napisać skrypt do parsowania danych zapisanych w plikach .bag (link).
- Uznać pierwszy pomiar o statusie 2 lub 3 jako pomiar początkowy (początek układu współrzędnych).
- Z wykorzystaniem z zewnętrznej biblioteki utm obliczyć początkową pozycję w układzie UTM. W c++ można wykorzystać tę funkcję.
- Wykorzystać bibliotekę do konwersji każdego następnego pomiaru do układu metrycznego, a następnie wyrażenie wyniku metrycznego względem pomiaru początkowego.
- Zebranie wszystkich pomiarów i zapisanie ich do pliku.
Uzyskany plik zawiera dane referencyjne do oceny działania systemu ORB-SLAM3. Nazwijmy go dgps.txt.
Proszę o przesłanie skryptu konwertującego i pliku dgps.txt.
Autorzy: Michał Nowicki, Kamil Młodzikowski